可穿戴设备,如可穿戴智能手表和智能手环,具有极大的市场规模和发展前景。当前,可穿戴设备主要以化学燃料电池为供能单元。但由于电池的容量有限,其续航能力限制了设备的长期使用。同时,对废弃化学电池的处理会造成环境污染。目前研究者已提出利用压电效应、电磁效应、热电效应等多种方法将人体的机械能转化为电能,从而为可穿戴设备进行供电。但这些能量采集器因其电量输出低无法有效的驱动智能手表和智能手环。
受啄木鸟舌骨这一特殊结构的启发,近日, 香港城市大学杨征保课题组 的研究团队 提出了一种仿生能量采集器,用以为智能手表供电 。相关研究成果以“Woodpecker-mimic two-layer band energy harvester with a piezoelectric array for powering wrist-worn wearables”为题在国际期刊 Nano Energy(IF:17.88)上发表(DOI:10.1016/j.nanoen.2021.106385)。
众所周知,啄木鸟啄木时,其头部受到非常剧烈的冲击而不会发生脑震荡。研究人员发现,相比于其他鸟类(如鸡、鸽子),啄木鸟头部具有不同寻常的Y型舌骨。该舌骨缠绕于啄木鸟头骨。当受到来自树木的冲击力时,舌骨能有效的传递和吸收冲击力。受此结构启发,研究人员提出仿生双层表带压电能量采集器,用以更好的吸收人体机械能。如图1所示,类似于舌骨的双支结构,该设计包含内外两层表带,其中内表带用于固定设备于手腕,外表带用于支撑表盘和安装压电单元。该能量采集器共有两种工作模式,即运动模式和拍击模式。在两种工作模式下,外表带均会相对于内表带和手腕运动,进而产生变形,所产生的变形被压电单元吸收,利用正压电效应,从而实现机械能向电能的转化。
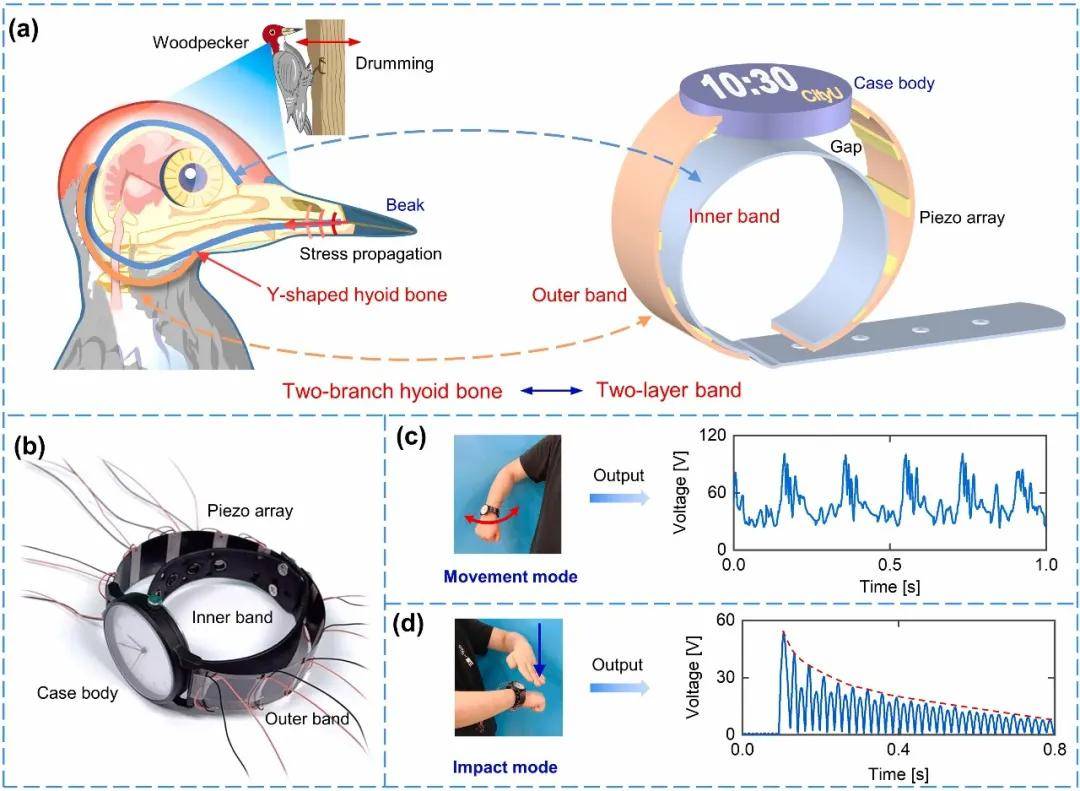
图1. (a) 仿生双层表带压电能量采集器;(b) 实物图;(c) 运动模式;(d) 拍击模式。
压电阵列结构为能量采集单元。如图2所示,为使各压电片高效输出,研究人员对结构进行了应力分析,从而确定了最佳贴片位置,并对贴片后的结构进行了模态分析,最后利用整流电路将各压电片所产生的交流电转化为直流电。
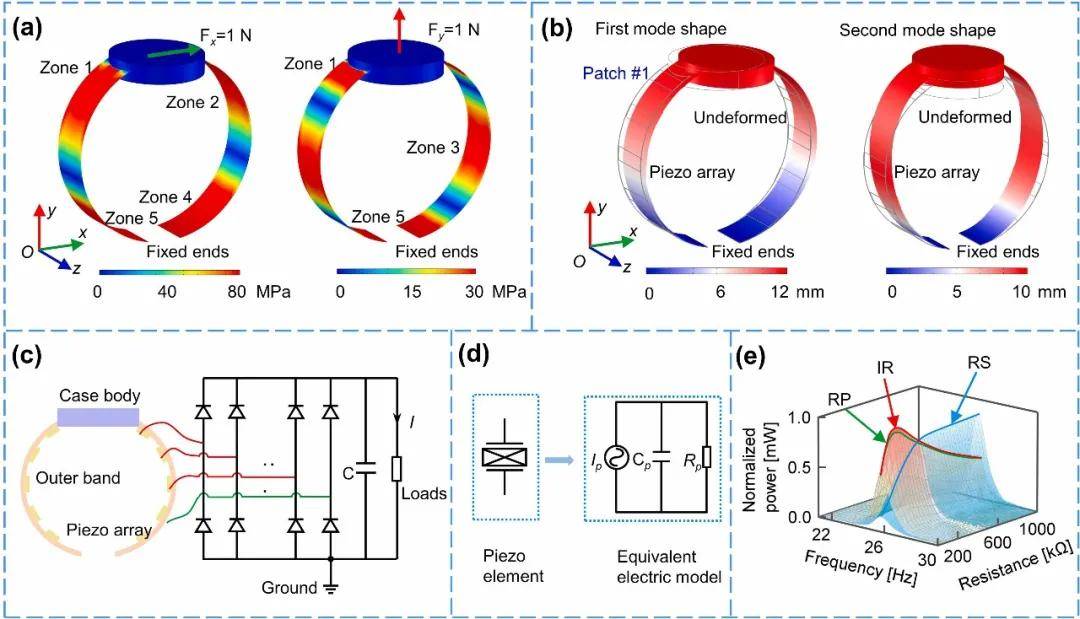
图2. (a) 应力分析用于确定最佳贴片位置;(b) 模态分析;(c) AC-DC整流电路图;(d) 压电片等效电路模型;(e) 三种整流电路比较。
在运动模式下,对该仿生能量采集器进行了测试,测试结果见图3和图4。
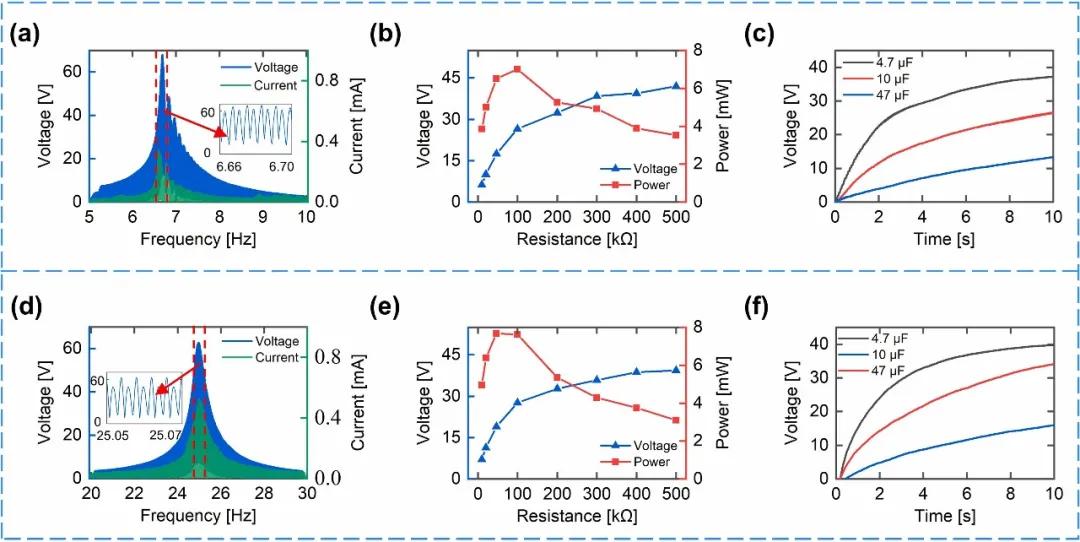
图3. (a) x方向加速度激励下仿生能量采集器的开路电压和短路电流;(b) x方向加速度激励下仿生能量采集器的阻抗匹配结果;(c) x方向加速度激励下仿生能量采集器充电容;(d-f) y方向加速度激励下仿生能量采集器的实验结果;
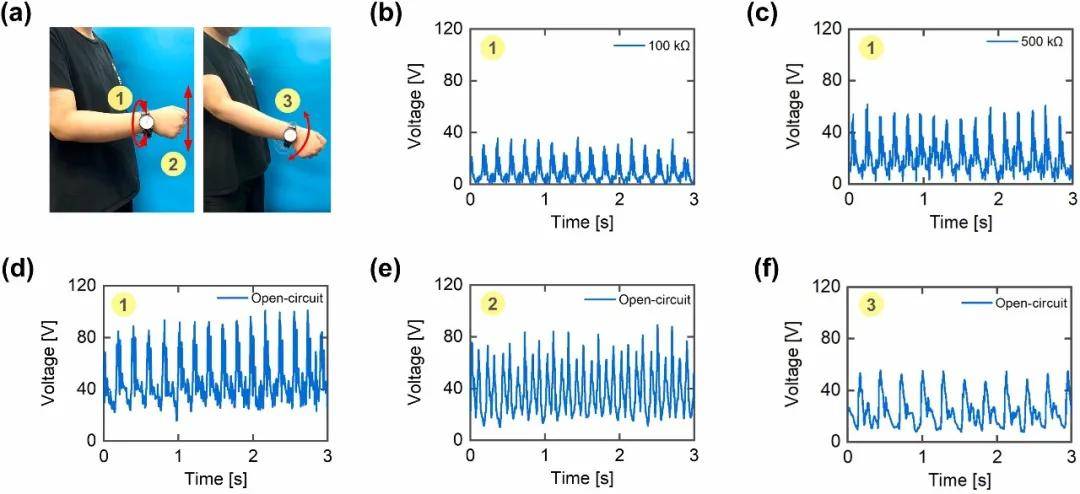
图4. (a) 三种常见的运动模式;(b-d) 扭转手臂下的电信号输出;(e) 晃动手臂时的电信号输出;(f) 快走时的电信号输出。
在拍击模式下,对该仿生能量采集器的测试结果见图5。该模式下输出的最高电量为15.41 mW,相应的功率密度为1049.01 μW/cm3。
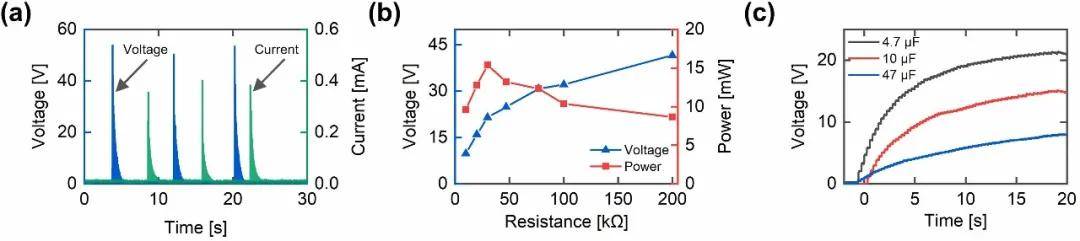
图5. (a) 拍击时仿生能量采集器的开路电压和短路电流;(b) 拍击时仿生能量采集器的阻抗匹配结果;(c) 拍击时仿生能量采集器充电容。
港城大在读博士生王标为该论文第一作者
。 在读博士生龙之河为该论文共同第一作者 。杨征保博士为论文通讯作者。该论文其他作者有港城大在读博士生洪颖、潘其其和林伟康。同时,本课题组感谢相关企业对该项目的支持。
合作机构
联系方式
