为提升AR/VR交互的自然感,Meta为Quest头显加入手势识别技术,希望通过五指的自然输入来代替手柄。这样做不仅能提升AR/VR的沉浸感,对于新用户也更友好。尽管如此,基于光学的手势识别方案通常难以识别手指触碰虚拟物体时,产生的细微压力变化。因此,对准确性要求极高的工业、企业VR培训场景通常会用触觉手套来追踪手势。

实际上,现有的触觉手套方案难以规模化,依然受到成本、耐用性、使用门槛、体积和重量等因素限制。而为了解决这一问题,Meta的AI科研人员与卡内基梅隆大学合作,研发并开源了全新的触觉感知AI“皮肤”ReSkin。据悉,ReSkin的特点是方便替换、低成本、场景通用、耐用,厚度仅2到3毫米。
除了ReSkin的设计方案外,科研人员还公布了相关论文、代码和基础模型,通过提供一系列触觉数据,帮助其他科研人员加速AI算法的训练过程。
Meta表示:触觉是人们感知世界的重要方式,我们可以通过触觉来感知物体的重量、材质(软、硬)、结构等特征。此外,我们也通过触觉来完成穿鞋、做饭等一系列日常活动。而对于AI、机器人来讲,目前在视觉、听觉方面的识别效果比触觉更加成熟。
而市面上用来训练AI的触觉感知数据有限,限制了相关的技术发展。因此Meta面向主要面向科研人员开源ReSkin,目的是帮助科研人员快速、大规模深化AI的触觉感知能力,并收集更丰富的AI触觉感知数据。
纽约大学计算机科学助教Lerrel Pinto表示:机器人学科的一项关键技术瓶颈,就是需要寻找性能稳定的触觉感知方案。现有的传感器不是成本太高,就是分辨率太低,而定制的机器人结构通常比较笨重。而ReSkin将有望解决上述部分问题,比如由于其外形轻薄,容易与抓取式机器手集成。
总体来讲,ReSkin从三大方面解决了上述问题:
关于原理
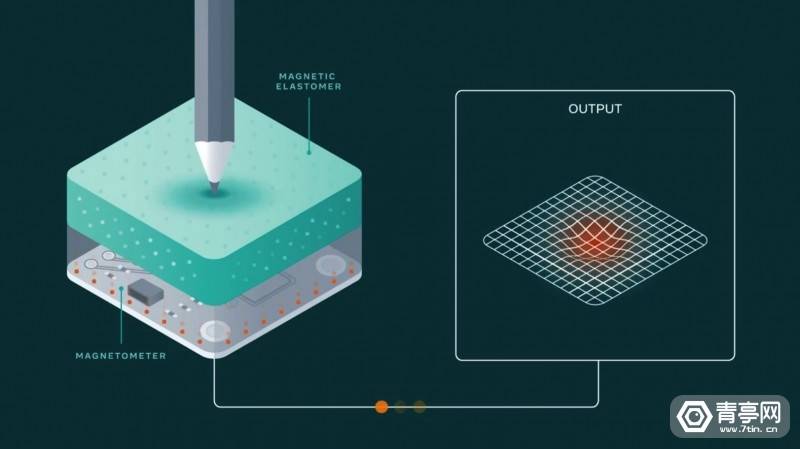
据青亭网了解,ReSkin是一种柔性的触觉传感方案,其采用可变形的弹力材质,其内置磁性颗粒,因此在产生变形时,其向周围发射的电磁信号也会改变。接着,可以用磁力计靠近ReSkin来测量电磁信号变化,并通过算法将数据转化为可用的信息,比如:接触的位置、力度等等。
据称,ReSkin可识别高采样率的三轴触觉信号,可提升机械臂在物体上滑动、扔物体、接物体、拍手等动作的执行效果。
利用近距离电磁传感的优势在于,它可以识别近距离的压感,而且无需传输线。相比之下,基于摄像头的体感传感器通常需要一段最短距离才能识别,很难识别直接接触的体感,而且设备的结构也笨重。而ReSkin则更加通用,可直接覆盖在人或机器人的外面。
ReSkin特点
除了上述优势外,ReSkin还具备通用性、耐用性、低成本等特点。
通用性:ReSkin可以识别并收集丰富的触觉数据,并用来执行多样化的触觉任务,比如:目标分类、机器人本体的触觉感知(proprioception)、机械臂抓取等等。而具备学习式触觉感知功能的AI模型,将可以执行各种类型的任务,即使对灵敏度要求更高的医疗场景,或是对敏捷度要求高的场景,比如:操控小型、柔软或敏感的物体。
此外,ReSkin也可以集成其他传感器,结合多种模式的传感数据,进一步提升AI感知环境的能力。比如,集成视觉、声音和触觉,AI在实验室外的非结构化场景中也可以创建基于物理环境的模型,甚至还可以将额外的多重数据用于自我监督学习。
另外科研人员发现,在开发早期的柔性传感器方案时,人们通常侧重于详细分析传感原理,而很少去研究传感器的长期响应效果,或为非专业用户开发自动校正功能。
目前,大多数触觉传感实验依赖于单一的传感器,更换传感器后便需要重新培训AI模型,造成试验效率低、不实用。考虑到ReSkin在大量实验场景可能需要进行更换,这个方案将省去重新训练模型的步骤。通过自我监督的学习算法来自动校正传感器,意味着在不同的场景可实现通用性,而且数据可兼容不同的传感器和系统。
尽管如此,由于柔性材料在制造过程中自然产生的差异,柔性传感器通常很难达到通用。而柔性材料经过一段时间使用会改变性质,甚至会因为使用方式不同而产生不同的变化。再加上为了确保响应能力,每个传感器均要经过彻底的初始校正流程,而且校正时还需要适应柔性材质的变化。
低成本、耐用:制造一百件的成本为每件6美元以下,产量越高成本还将越低。另一方面,ReSkin也足够耐用,支持5万次以上交互,而且采样率最高可达400Hz,误差仅1毫米,准确率90%。磨损达到一定程度后,也可以轻松更换。
科研人员表示:耐用、低成本的柔性传感器形态,使得ReSkin成为机器手、触觉手套、宠物鞋垫的理想材质。也就是说,配备ReSkin的这些设备,可以帮助科研人员手机触觉数据,用来培训AI模型。而在此之前,采集相关数据很难,甚至不可能。
实际应用场景
为了演示ReSkin的原理,科研人员在这个柔性传感器上放置了一个玻璃杯,并向杯中注水,水越来越多意味着杯子的重量也在增加,与此同时造成ReSkin的磁性传感器变形,压力越大传感器变形越大,电磁信号也越强。
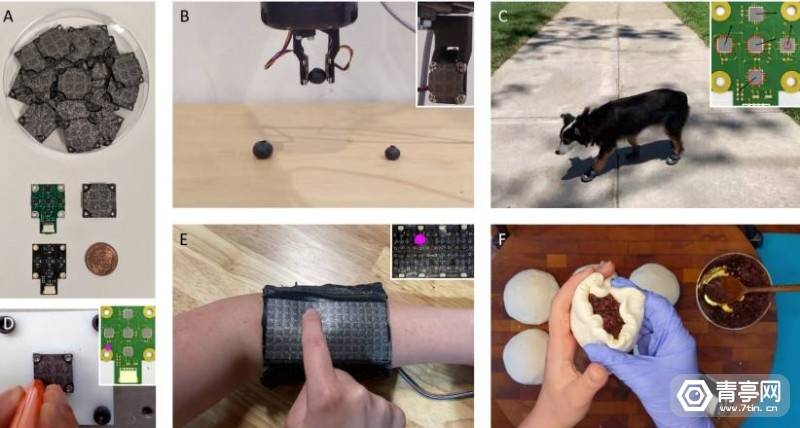
此外,还测试用机器人抓手来抓取蓝莓、葡萄等易变形的物体,并对比使用ReSkin和使用自带力传感器的区别,发现利用ReSkin动态识别触觉后,可有效避免抓力过大造成物体变性能。此外,在替换新的柔性传感器后,ReSkin方案无需额外的调整即可立即使用,效果足够稳定。
同时,ReSkin也可以用于野外测试场景,其紧凑的设计意味着足够便携,因此可以作为小狗的鞋底,追踪小狗在野外行走、跑步、休息时的运动数据。
还可以实时测试细微的触觉力反馈,比如可以将ReSkin集成在手套上,追踪用手包包子的力量变化,效果足够好。
而为了测试ReSkin规模化的效果,科研人员将8个传感模组连接在一起,发现增加传感器可增加追踪区域,可识别手指在传感器任意区域施加的压力。也就是说,未来可以用ReSkin传感器覆盖整个手套,用于提升机器人或体感手套的触觉感知能力。
接下来,除了ReSkin方案Meta还将开源相关的生态系统,包括高分辨率触觉硬件DIGIT、触觉模拟器TACTO、测试基准PyTouch和数据集。这样做的目的是,鼓励其他科研人员以此为基础在不同的场景中训练AI对触觉的感知能力,进一步推动AI技术发展。而纽约大学Pinto的团队也将继续探索ReSkin在实验室机器人上的应用。
合作机构
联系方式
