失去触觉是阻止上肢缺席的人同时处理多项任务或使用假手的全部灵巧性的主要障碍。使用当前的肌电假手,即使现代人工手在机械上能够单独控制所有五个手指,肢体缺失的人一次只能控制一个抓握功能。本文研究了人们是否可以精确地控制施加在两个不同物体上的抓握力,同时用一只灵巧的假手抓握。开发了一种新颖的多通道可穿戴软机器人臂章,以向机器人手用户传达人工触觉。多个触觉反馈通道使受试者能够用灵巧的假手同时成功地抓住和运输两个物体,而不会折断或掉落它们,即使他们对两个物体的视觉都受到阻碍。

Erik Engeberg 博士与用于研究的灵巧假手合照。
对于假手使用者来说,在键盘上打字、按遥控器上的按钮或给孩子编头发仍然是难以捉摸的。使用当前的肌电假手,用户一次只能控制一个抓握功能,即使现代人工手在机械上能够单独控制所有五个手指。
一项使用触觉/触觉反馈、肌电图 (EMG) 控制和创新的可穿戴软机器人臂章的首创研究可能会改变长期期待灵巧性进步的假肢用户的游戏规则。该研究的结果可能会促进当前和未来的人造手由缺肢者控制的方式发生范式转变。
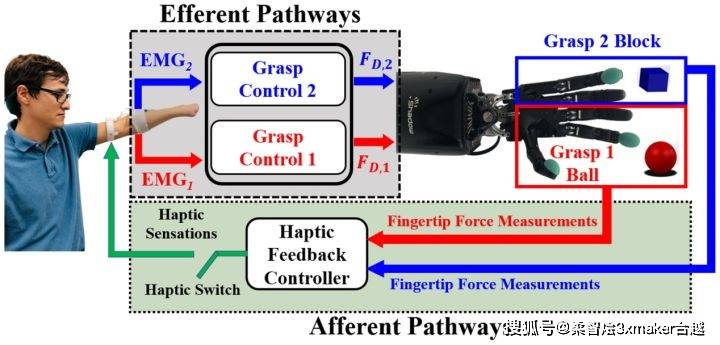
在具有和不具有触觉(底部面板)和/或视觉反馈的组合实验计划中,受试者使用两个 EMG 信号(传出路径,顶部)同时控制施加到两个不同对象(右上角)的不同抓握力。该研究表明,即使在物体的视觉完全被遮挡的情况下,双模态触觉反馈的多个通道也能够同时成功地抓住和运输两个物体。
佛罗里达大西洋大学工程与计算机科学学院的研究人员与 FAU 的 Charles E. Schmidt 科学学院合作,研究了人们是否可以精确地控制施加在两个不同物体上的抓握力,同时用一只灵巧的人工手抓握。
在这项研究中,他们还通过在实验设计中系统地阻止视觉和触觉反馈来探索视觉反馈在这个复杂的多任务模型中所起的作用。此外,他们还研究了与一次一个的方法相比,同时进行的物体运输实验中节省时间的潜力。为了完成这些任务,他们设计了一种新颖的多通道可穿戴软机械臂带,以向机械手用户传达人工触觉。
发表在《科学报告》上的结果表明,多个触觉反馈通道使受试者能够用灵巧的假手同时成功地抓住和运输两个物体,而不会折断或掉落它们,即使他们对两个物体的视线都受到阻碍。
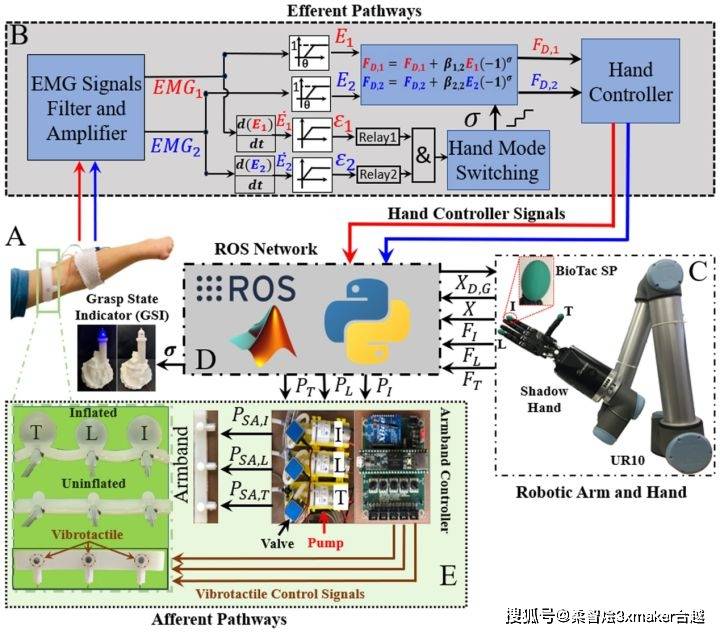
系统配置:所有系统组件通过 ROS、Python 和 MATLAB/Simulink 相互交互。( A ) 将两个 EMG 表面电极放置在人类受试者的前臂上,以记录前臂肌肉活动。柔软的机器人臂章位于上臂。(乙)EMG 信号处理(传出路径)在 Simulink 中完成,以控制通过( D)ROS连接的( C)shadow灵巧手和 UR10 机器人手臂。( E) 软机器人臂章的三个软执行器中的每一个都有一个泵、阀门和压力传感器。振动触觉致动器也与软致动器位于同一位置,为同时抓握的两个物体(传入通路)提供双峰多通道触觉反馈。
控制系统概述。
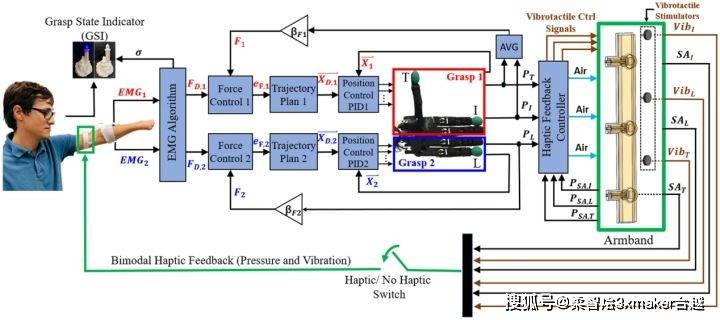
混合力-速度控制器,可同时控制施加在shadow灵巧手抓握的两个不同物体上的力。触觉反馈控制器(右)提供来自三个机器人指尖的双峰多通道触觉信息,使用软致动器和快速作用的振动触觉信息,用于指示一个或两个物体的破损。
研究对象能够在用拇指和小指拧开水瓶盖的同时控制用食指和中指夹住一张卡片。此外,他们可以用三个手指抓住一个球,同时用小指拨动电灯开关。
此外,与先前研究中常用的一次一个方法相比,同步控制方法缩短了运输和交付两个物体所需的时间。值得注意的是,对于临床,研究人员没有发现肢体缺失受试者与其他受试者在任务中的关键绩效指标方面存在显着差异。重要的是,即使在视觉可用的情况下,受试者也定性地认为触觉反馈比视觉反馈重要得多,因为在抓取的物体被破坏或掉落之前,通常几乎没有视觉上可感知的警告。
“我们的研究首次证明了这种复杂的同时控制任务的可行性,同时无创地集成了多个触觉反馈通道,” “我们的研究参与者都没有大量使用 EMG 控制的人工手,但他们能够在两次简短的培训后学会利用这种多任务处理功能。”
为了提供触觉反馈,Engeberg 和研究团队与 Emmanuelle Tognoli 博士(合著者、FAU 心理学系和研究中心的研究教授)一起致力于定制制造的多通道双峰软机器人臂带的 EMG 控制和设计。
制造软机器人臂章
臂章配有软致动器,以传达接触力的比例感;包括振动触觉刺激器以指示抓握的物体是否已损坏。臂章设计用于在对应于拇指、食指和小指的三个位置进行触觉反馈,其数量足以传达施加于手抓的两个物体的力的幅度。臂章有三个气室,每个气室都按比例对应于 Shadow Hand 指尖上配备的三个 BioTac 之一。臂章还配备了三个位于同一位置的振动触觉致动器,如果抓握中的物体被破坏(如果超过一个或两个力阈值),它们会振动以提醒受试者。
三个模具被 3D 打印以制造臂章:基础、插入和基础模具,以创建臂章的驱动层和基础层。将基础和嵌件模具配合在一起,为顶层创建空腔。臂章层是独立铸造的,然后粘合在一起形成臂章结构。臂章层由不同肖氏硬度的皮肤安全材料模制而成。顶层由 EcoFlex-50 (Smooth-On, PA, USA) 模制而成,而底层由更刚性的材料 (Dragon-Skin 30 (Smooth-On)) 模制而成,以将软致动器的膨胀导向充气时用户的皮肤。将振动触觉刺激器插入基模中,以传达高频触觉,以提醒受试者如果一个或两个抓握的物体已被破坏。
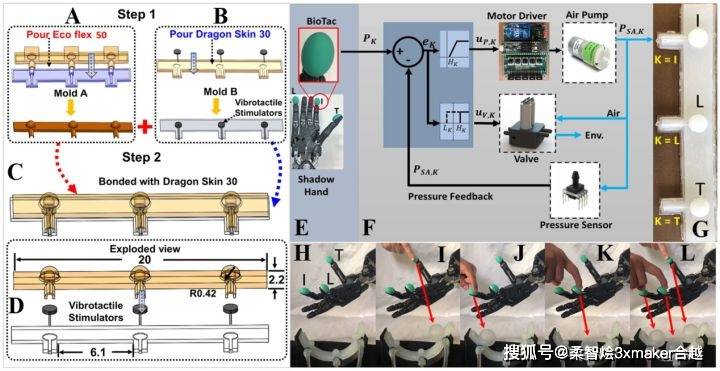
软机器人臂章:制造和控制。
( A ) 上模和底模配合制造臂章的驱动部分。( B ) 振动致动器嵌入底座中。( C ) 致动件和底座部件粘合在一起。( D ) 显示臂章组件的分解图,单位为厘米。( E ) Shadow Hand 和 BioTac SP。( F ) 软执行器非线性压力控制器。( G ) 软机器人臂章,其中 T、L 和 I 分别表示拇指、小指和食指。( H) 三个连接到 Shadow Hand 的 BioTac SP 处于静止状态。请注意臂章上所有三个气室的放气状态(出于说明目的,放置在手下方)。( I ) 对拇指 ( J ) 食指施加压力,和 ( K ) 小指尖单独或 ( L ) 同时在软机器人臂带致动器内产生按比例缩放的压力,由三个非线性控制器中的每一个实现。
“我们研究中展示的多功能控制示例包括在食指和中指之间夹住一张卡片的比例控制,同时用拇指和小指拧开水瓶盖。另一个同时控制演示是用三个手指抓住一个球,同时用小指拨动电灯开关,”第一作者和博士 Moaed A. Abd 说。
从研究中发现的信息可用于未来高度复杂的双手操作框架,例如外科医生和吉他手所需的框架,目标是使上肢缺席的人能够追求目前无法实现的职业道路和娱乐追求。
合作机构
联系方式
