前沿 | 新型电子纹身:有望用于医疗、VR和可穿戴机器人等领域
可穿戴设备,已经成为我们生活中极为常见的一种设备,它们体积轻巧、佩戴方便、检测数据齐全,但也存在一个很明显的缺点——无法适应运动状态的数据实时监测。为解决这一问题,科学家们近年来一直在不断探索新的解决方案,电子纹身应运而生。
“电子纹身” 是一张可以直接贴在人体表面的超薄电路,与普通纹身不同,电子纹身无需外创即可紧紧贴在皮肤上,随皮肤可随意拉伸、弯曲,可用于检测心电、肌电等人体健康数据,被认为是可穿戴设备的终极形态。
近日,来自南方科技大学、首都医科大学和中国科学院大学的联合研究团队在电子纹身这一研究方向实现了新突破。他们开发出一种集成多层电路的电子纹身(multilayered electronic transfer tattoo,METT)。
这种电子纹身兼具高延展性(8 倍)、保形性和粘性等优点,可以嵌入手指皱褶和指纹等一些皮肤上细小的特征中,能够牢固地附着在皮肤上,且在皮肤表面经反复变形后也不会脱落。

(来源:Science Advances)
相关研究论文以 “Multilayered electronic transfer tattoo that can enable the crease amplification effect” 为题,于近日在线发表在科学期刊 Science Advances 上。
研究人员表示,这一新型电子皮肤有望在医疗系统、虚拟现实和可穿戴机器人领域实现广泛应用。
突破厚度极限,变形远超人类皮肤
事实上,可穿戴设备的研究与应用已有多年,大多数现已报道的可穿戴设备都基于硅胶基底设计,虽然这种基底具有良好的柔性和可拉伸性,且不会对人体组织造成损伤,但无法牢固地附着在人体皮肤上,当与人体粘合部位的皮肤变形时,设备就会脱落。
如今,心率监测腕表可能已经是人们生活中常见的设备,人们希望用它来监测自己的实时心率等数据,但恰恰是在运动时,由于腕表与皮肤的贴合度不够高,检测出来的数据精度往往无法保证。
而作为一种能够实现可穿戴设备与皮肤之间稳固粘合的“终极形态”,电子纹身有望解决这一问题。
近年来,科学家们不断通过使用不同的材料、设计方法等,来探索设计性能更优越的电子纹身。早在 2018 年,美国卡耐基梅隆大学的研究人员就采用现成的打印机,开发出了一种具有高鲁棒性和柔性的电子纹身,并表示有望将其应用于可穿戴计算、柔性显示器、软体机器人等领域。但是,目前的电子纹身通常是采取直接将电子电路印在皮肤上或商业转移纹身的方式,存在电路设计简单、功能单一、厚度较大等缺点,无法同时满足可穿戴设备的附着性、褶皱保形性和多层性等需求。
为克服这些不兼容性,研究人员在此次研究中基于分层策略,设计了一个包含 1 个加热器和 15 个应变传感器的三层 METT 结构电路。该结构可以嵌入到手指折痕和皮肤上的指纹等细小特征中,以便在附着部位反复变形时,也可以牢固的附着在上面。

图 | 三层 METT 的示意图和光学图像。(A)包含三个电路层的 METT 的分解示意图;(B)METT 的逐层制造的示意图;(C)转移到皮肤上的 METT 的光学图像;插入时,可以将 METT 嵌入手指关节的折痕中;(D)METT 的光学图像,用于远程控制机械手。(来源:Science Advances)
据论文描述,METT 包含三个部分,粘合剂层,离型层以及两者之间的电路模块。其中,粘合剂层采用了医用胶带上使用的丙烯酸压敏胶,无毒且粘合力度强;考虑到金属聚合物导体(MPC)具有优良的导电性和拉伸性,研究人员在电路设计中采用基于 MPC 的应变传感器,来制作 METT 中的电路模块。实验证明,该电子纹身在外力影响下,仍可牢固地粘贴在不同的表面上。
对此,研究人员表示,该设计突破了液态金属基电子纹身的厚度极限,使 METT 同时兼具多层电路设计和保形性的优点,电路可以集成任意数量的应变传感器或其他功能元件,同时可以保留褶皱放大效应,这是其他技术无法实现的。
此外,研究人员还测试了 METT 结构中基于 MPC 的应变传感器的机电性能。结果表明,随着皮肤局部拉伸变形的增加,METT 所使用应变传感器的电阻也随之增加,并且可以很容易地被拉伸到 8 倍的变形程度,这已经远远超过了皮肤的最大变形。

图 | METT 可以实现折痕放大效果,具有保形性和粘性(来源:Science Advances)
实验结果表明,该结构所使用的传感器在经过 1000 次拉伸后,也表现出了出色的可重复性,同时这种多层电路电子纹身能够实现皮肤折痕放大效果。当变形集中在皮肤的皱纹上,会使得电子纹身上应变传感器的输出信号放大到 3 倍,且由折痕放大引起的局部变形不会影响应变传感器的性能。
远程控制机械手,应用前景广泛
在应用层面,研究人员设计了三层电子纹身的横截面,在纹身结构中嵌入了液态金属颗粒,从而在每一层中形成导电网络,使用三层 METT ,通过位于皮肤上的传感器来测量手部的运动,可以测量 15 个手势的自由度。
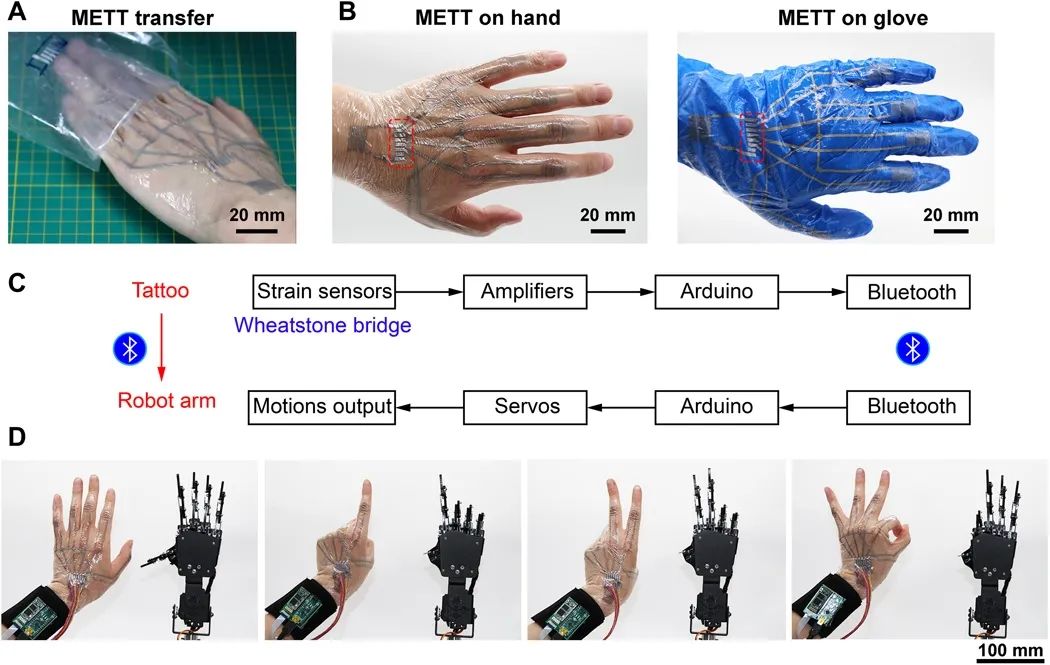
图 | METT 可以远程控制机械手(A)将电子纹身转移到手上的照片;(B)METT 分别粘贴在皮肤上(左)和处置手套上(右),红色虚线框为外部接触垫;(C)机器人控制系统的系统级框图;(D)METT 可以远程控制机械手的部分动作。(来源:Science Advances)
测试结果显示,通过蓝牙将手指弯曲产生的放大信号传输到机械手,两层 METT 可以实时控制 6 个自由度的机械手。
研究人员表示,METT 结构可以通过增加机器手的自由度,应用于机器人控制系统,来远程执行微妙而复杂的任务,有望在医疗系统、虚拟现实和可穿戴机器人领域实现巨大应用。
同时,基于折痕放大效果的应变传感器也具有更广泛的应用,而不仅仅局限于具有折痕的皮肤。