前沿 | 脑机接口新进展:只凭意念,操纵机器移动、拿取物体成为现实
近日, 来自洛桑联邦理工学院(EPFL)、得克萨斯大学奥斯汀分校(UT)的科学家团队,就开发了一种可以仅借助人类大脑发出的电信号就能控制机器人的强化学习系统 ——无需任何语音控制或触控功能,使用者只需要简单地“想一想”,就可以操控机器人完成移动、拿取物体等任务。
据论文描述,这项基于脑机接口的研究,目前主要针对瘫痪患者,可以让机器人更加准确、快捷地辅助瘫痪患者的正常生活,以提高他们身体的灵活性。
相关研究论文以“Customizing skills for assistive robotic manipulators, an inverse reinforcement learning approach with error-related potentials”为题,已发表在 Nature 子刊 Communications Biology 上。
意念控制的前提:规避障碍
多年来,科学家们致力于开发一种可以辅助患者控制身体的系统,以帮助瘫痪患者完成日常生活必需的活动。
在某种意义上,智能机器人的出现可以帮助瘫痪患者恢复一定的身体灵活性,因为他们可以操作机器人来代替自己完成任务。
然而,目前的辅助设备一部分仅限于通过摄像头等装置实现自动避障,控制权并非在瘫痪患者自己这边。另一方面,即使是瘫痪患者掌握避障选择权,也都是基于语音或操作控制面板来满足需求,普适性并不高。
为了解决这一问题,此次研究团队希望首先解决“机器人规避障碍”的问题。 因为患者们的所有日常活动都会涉及这一点,如果没有一个好的避障系统,对患者来说,机器人就没有了辅助意义。
因此,研究人员从他们几年前开发出的机械臂着手,该机械臂可以来回移动,不断实时定位它面前的物体,并绕过移动路径上的障碍物。
大脑电信号与逆向强化学习
论文通讯作者之一、EPFL 学习算法与系统实验室的负责人 Aude Billard 教授说:“在此次研究中,我们不仅对机器人进行了编程以避开障碍物,而且选择了一些其他更难的任务,例如在桌子上放一个装满水的杯子,然后要求机器人避开水杯、将目标物体拿到指定位置。”
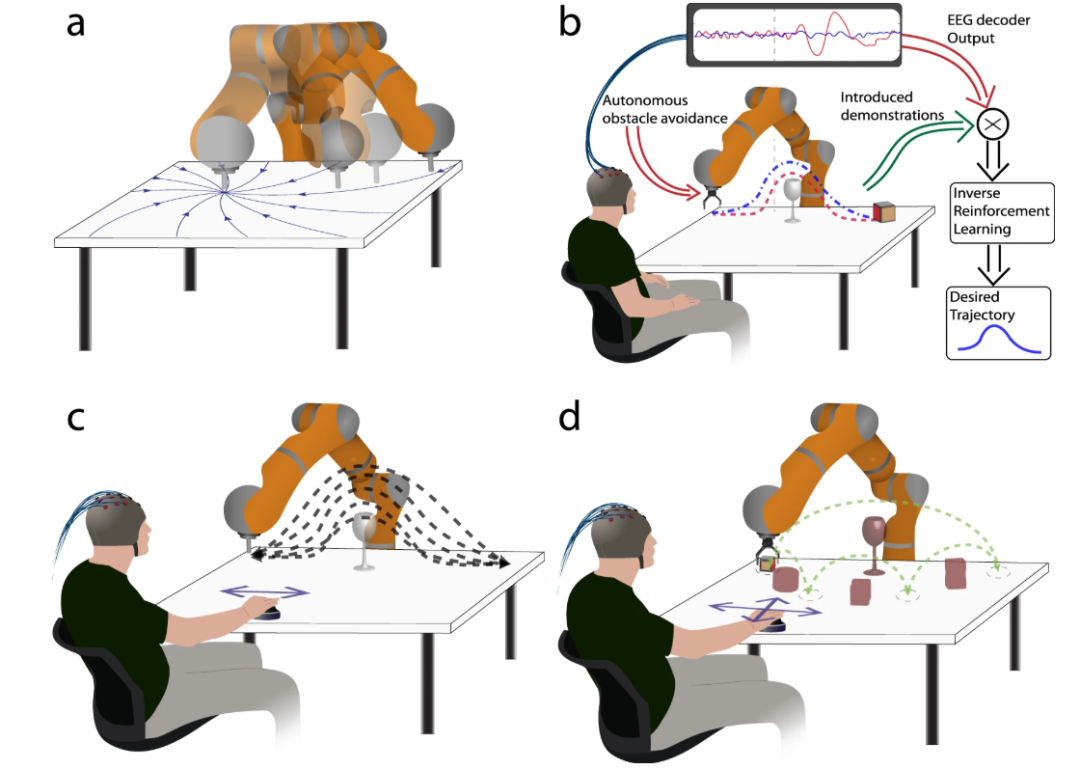
图 | 机械臂避障示意图。(a)机械臂原本的移动路径;(b)机械臂完成更难任务时的移动路径;(c、d)患者使用控制面板上下左右操纵机械臂
然而,这还远远不够。
因为起初,机器人会自动选择将物体移到较远的地方,从而清理出一条对某些障碍物来说较宽的路径。但问题在于,这条路径对其他大点的物体来说不够宽,而且有时移动的距离也不够远。
那么,能不能在患者的脑海与机器系统之间建立某种连接,来真正实现“意念控制”以达到更完美的避障效果呢?
要实现“意念控制”,首先需要设计出一种算法,该算法可以完全根据患者脑海中的想法来调整机器人的各种运动。于是,工程师们为患者戴上配有电极的头罩,该头罩可以对患者的大脑活动进行脑电图 (EEG) 扫描,一旦出现异常的电信号,就会对机器人的行动产生影响。
当机器人按照设定的 AI 程序进行避障时,患者所唯一需要做的就是看着机器人。 如果机器人做出了不正确的动作,患者的大脑会通过一种清晰可辨的电信号发出“错误信息”的警告,就好像在对机器人说“No”。
一旦接收该信号,机器人就会停止当前动作。但实际上,它并不能确切地“理解”问题出在哪里。例如,自己当前究竟是离障碍物太近还是太远?
因此,研究团队还开发了一种基于逆向强化学习方法的算法,来帮助机器人去进行“推理”,以找到正确答案。
首先,错误信息会被输入到算法中,计算出患者想要什么以及机器人应当采取什么行动。 这实际上是通过试错过程来完成的,也就是说,机器人会开始尝试不同的动作,看看哪个动作是正确的。 这个过程并不会花费较多时间,机器人通常只需要尝试三到五次就能找出正确的反应并执行患者的愿望。

图 | (左)机器原本生成的避障轨迹,红色区域表示可能出错的路径;(右)经过患者大脑纠正后的避障路径
在实验中,研究人员以机械臂拾取、放置、避开物品等任务为例,并在受试者身上验证了该方法。此外,用户还能够训练机器人控制器来调整其自动接近障碍物的方式,从而生成个性化的机器人活动轨迹。
未来的发展
不过,该技术也存在一定局限性,正如论文通讯作者之一、EPFL 脑机接口实验室的负责人 José del R. Millán 教授所说:“此次开发的机器人AI程序可以快速进行学习,但你必须在它犯错时用意念告诉它,只有这样,它才能迅速纠正当前的行为。”
研究团队也表示:“目前,我们面临的最大技术挑战之一就是开发出更加智能、准确的错误信号检测技术。”
但不可否认的是,此次研究已经部分实现了“直接依靠脑电波控制机器人”。实际上,仅仅在中国,平均每 1000 人中就有一位脊髓损伤患者,因此这项研究成果无疑为这些患者带来巨大希望,让他们不需要语音控制或触摸功能就能控制机械系统,在最大限度上回归正常生活。
此外,研究人员还表示,希望最终使用此套算法系统来控制轮椅。毕竟对于患者来说,轮椅就是他们的四肢,“尽管目前仍有许多工程困难需要克服,但是如果实现了意念控制轮椅,那才是真正意义上从禁锢的身体中解脱出来。”