前沿 | 上科大学者研发软电子皮肤人机界面,并可大规模生产和重构
近日,科研人员研发了一种由 AI 驱动、基于软电子皮肤的人机界面。该系统具有全打印、可大规模生产特点,并能够进一步推广应用于其他遥感平台。
6 月 1 日,相关论文以《用于机器人理化传感的全打印柔性人机界面》(All-printed soft human-machine interface for robotic physicochemical sensing)为题发表在 Science Robotics 上 [1]。
 (来源:Science Robotics)
(来源:Science Robotics)
上海科技大学生物医学工程学院常任轨助理教授、智能医疗分析与柔性生物电子实验室主任于游担任第一作者,通讯作者为加州理工学院医学工程系助理教授高伟。
据了解,该人机传感系统名为 M-Bot,其工作的方式是先采集人体的表面肌电信号,再使用机器学习算法对信号进行解码,最后达到远程控制机器人的目的。同时,机器手的电子皮肤可以执行接近感应及触觉和温度的感知映射,并在化学传感器的辅助下对溶液相和干相毒害化合物进行水凝胶辅助的现场采样和实时分析。
目前,有许多有毒化合物需要严格监管,比如农药、爆炸物或化学神经毒剂,其会引发神经系统疾病、不孕症等,甚至导致人的死亡。此问题解决的紧迫性进一步促使了可控人机交互机器人系统的开发。
之前的机器人传感技术主要集中在监测压力、温度等物理参数,但是能对杀虫剂、神经毒剂和传染病病原体等物质检测的化学传感器发展还不成熟。
本次研究人员开发的人机界面系统展示出在电子皮肤在物理和化学传感方面的广泛应用。
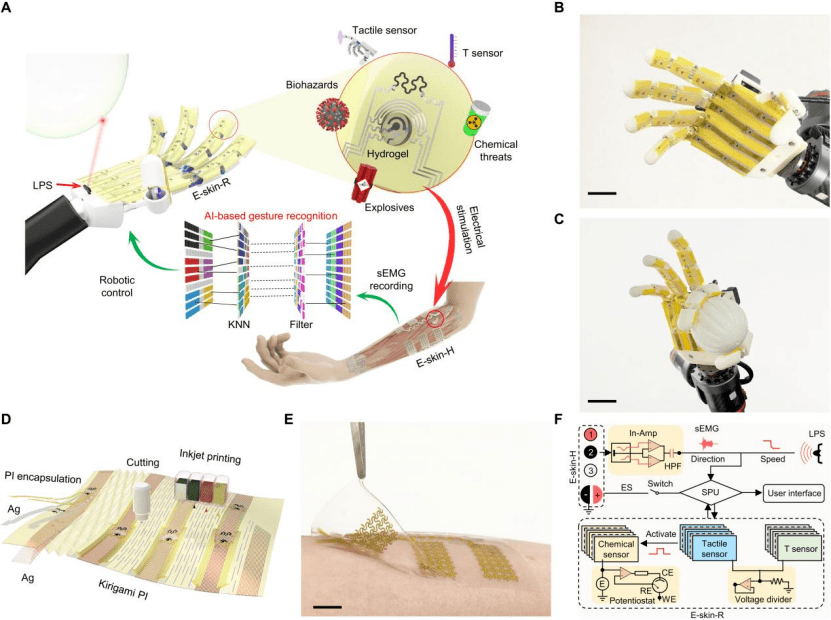 图 | M-Bot(来源:Science Robotics)
图 | M-Bot(来源:Science Robotics)
M-Bot 可以在危险性环境中进行原位威胁复合检测,比如有效地跟踪微量有害化合物,当通过智能决策算法检测到污染时,可为人们提供交互式触觉警报反馈。
当前新冠疫情仍在世界各地大流行,该工具也可扩展到对 SARS-CoV-2 等致病性病菌监测上,避免直接与患者接触,从而在抗击传染病方面发挥作用。
机器人要想得到有效部署,必须能够与环境进行交互。电子皮肤由于高灵活性和适应性,被认为是电子产品与人/机器人身体之间的理想接口。
不过,当前,基于电子皮肤的多功能机器人监测系统仍存在一定局限性和难点。
大多数危险化合物的快速检测方法需要手动样品制备步骤,将化学传感器集成到基于电子皮肤的机器人系统上较为困难,这阻碍了机器人与人交互和“感受”外部世界的能力。
机器人机械手在极端环境中需要触觉、化学和温度等反馈来处理任意物体,以进行准确的物理化学分析。
而于游等研究者打造的传感机器人系统 M-Bot 能够可靠地提取人体生理特征,并准确控制和接收实时用户交互反馈。
值得注意的是,如今的电子皮肤界面还需要面对的一个问题是,还较缺乏可扩展的低成本制造薄型、超灵活、多功能的机器人物理化学传感器贴片方法。
M-Bot 由两个可拉伸轻薄电子皮肤贴片组成,即 E-skin-R(与机器人皮肤接口)和 E-skin-H(与人体皮肤接口),并具有强大的理化传感能力,能大规模生产且可重构。
它可通过高速、低成本和可扩展的喷墨打印技术以及一系列定制开发的纳米材料墨水进行快速低价制备。
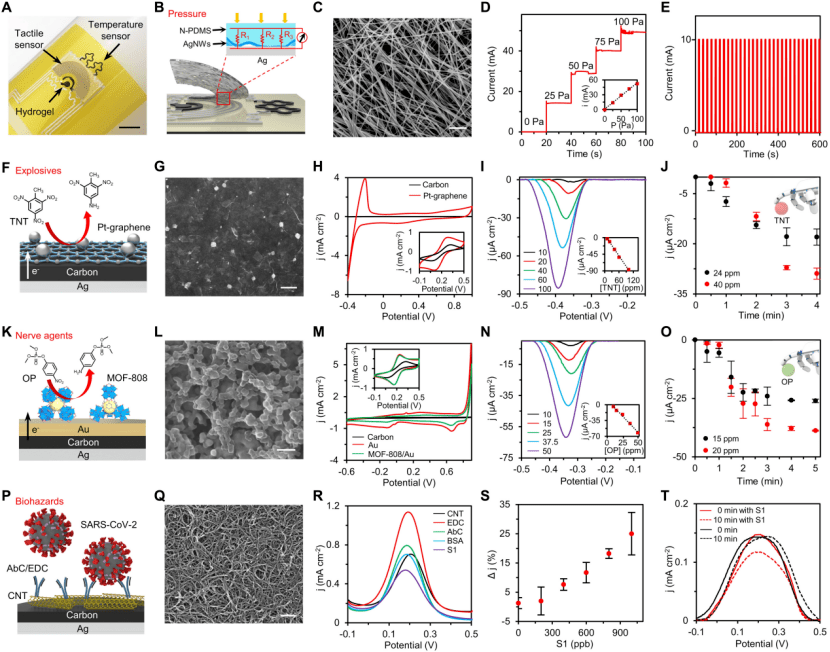 图 | E-skin-R 上全喷墨打印的多模态传感器阵列(来源:Science Robotics)
图 | E-skin-R 上全喷墨打印的多模态传感器阵列(来源:Science Robotics)
定制开发的功能纳米材料油墨经过设计和优化,可针对特定危险目标分析物实现高灵敏度和选择性传感器。水凝胶涂层的印刷纳米生物传感器,允许在机器人平台上进行有效的干相化学采样和快速现场危害分析。
M-Bot 的威胁感知能力可以为自动化化学传感铺平道路,并为各种实用的机器人辅助应用提供机器介导的决策。
实现高速、无线和同步多通道物理化学传感的全系统集成是未来现场部署和评估的关键需求。M-Bot 所代表的人机交互机器人传感技术,为开发先进柔软电子皮肤提供了一种从人体和周围环境中收集重要数据的有效方法。
最后,于游表示,通过集成高密度和新型多模态传感器,该技术还能较方便地重新配置实施到众多可穿戴设备和机器人应用中,并在未来智能机器人系统设计中发挥关键作用,比如大大提高其环境感知能力。